�����C(j��)�Ƅ�ϵ�y(t��ng)��(sh��)���y�о�
���ٙ�Ŀ���C(j��)еՓ�� �l(f��)�����ڣ�2011-03-22 09:12 ��ȣ�
����ժҪ���V�������C(j��)���Ƅ��b��ֱ��Ӱ푵������C(j��)�����������Ͱ�ȫ��Һ���Pʽ�Ƅ������Â��y(t��ng)���Ƅ��{(di��o)��(ji��)��ʽ���Ƅ����{(di��o)��(ji��)����(zh��n)�_��Һ��ϵ�y(t��ng)��(f��)�s�͵Ϳɿ��ԡ������C(j��)�Ƅ�ϵ�y(t��ng)���Ô�(sh��)�ֿ��ƣ�������Ƅ�ϵ�y(t��ng)�Ĝ�(zh��n)�_�ԺͿɿ��ԡ�ͨ�^���Ƅ�ϵ�y(t��ng)�Č���ģ����������Ϳ��Ƶ��о�����C(j��)�Ƅ�ϵ�y(t��ng)��(sh��)���y�M(j��n)һ���O(sh��)Ӌ�ṩ��Փ����(j��)��
�����P(gu��n)�I�~���Ƅ�ϵ�y(t��ng)����(sh��)���y�����棬���ƣ��о�
����һ��ǰ��
�����V�������C(j��)���Ƅ��b�ã����Q�Ƅ��������������C(j��)һ���dz���Ҫ�ĽM�ɲ��֣�ֱ��Ӱ푵������C(j��)�����������Ͱ�ȫ���҇���Ͳֱ��2m���ϵ������C(j��)��������Һ�����l�������ƄӵıPʽ�l�Ƅ�����
�����Pʽ�Ƅ�ϵ�y(t��ng)����Ҫ���c���l�߲��������Ƅ�݆�������������ƄӱP�ϡ����ǵV�������C(j��)�ϵ�һ�N�����Ƅ������õ��Ώ������Ƅ���Դ������(y��ng)�ٶȿ죬��ˡ�ú�V��ȫҎ(gu��)�̡�Ҏ(gu��)���������Ƅӿ��г̕r�g���ó��^0.3S�����͉��Ƅ���0.6SҪ�̡��Pʽ�Ƅ����ă�(y��u)�c�ǽY(ji��)��(g��u)�o�����l�ĸ���(sh��)�ɸ���(j��)��Ҫ�`�����p���҇�Ŀǰ���a(ch��n)�ĵV�������C(j��)ȫ�����ñPʽ�Ƅ�ϵ�y(t��ng)��
���������Ƅ�ԭ�������Ʒ�ʽ
�����Ƅ����ɎM���b�ýM�ɣ�ÿ�����b����֧�����w�����Ώ��ɡ��������Ƅ��ߵ�����M�ɡ���(d��ng)�Љ����ͳ���r��ͨ�^�������s���Ώ��ɣ�ͬ�r�Ƅ��Ƅ����x�_�Ƅ�݆�P���γ����l��B(t��i)����(d��ng)ж���r���͉������½����Ƅ��߉K�ڏ������������£������Ƅ�݆�P�_(d��)���Ƅ�Ŀ�ġ��Ƅ�����׃���Ǹ���(j��)�͉��ĸ�׃����׃�ģ���(d��ng)�͉�������r�������C(j��)̎��ȫ�ƄӠ�B(t��i)��
�����ɴ˿�Ҋ�������C(j��)�Ƅ�ϵ�y(t��ng)�͉���׃���������P(gu��n)��Ҫ�����ã����`���Ⱥ͜�(zh��n)�_��ֱ�ӛQ�����Ƅ����Ĵ�С���M(j��n)���P(gu��n)ϵ�������C(j��)�İ�ȫ��(w��n)���\(y��n)�С�
�����҇�Ŀǰ���a(ch��n)��Һ�رPʽ�Ƅ�ϵ�y(t��ng)�����{(di��o)���������������y�c�������ϵ�y(t��ng)�M�ɵ��Һ�{(di��o)���b�á��������Ǹ���(j��)�����C(j��)�Č��H�Ƅ����أ���������͉������������{(di��o)����
�����@�N���y(t��ng)���Ƅ��{(di��o)��(ji��)��ʽ����Ҫ���ԏ�(f��)�s��Һ����·���N�Һ�y�ąf(xi��)�{(di��o)�����팍�F(xi��n)�����Ƅ����ص��{(di��o)��(ji��)�;o���Ƅӕr�a(ch��n)�������Ƅӡ��@�ݱ؎����Ƅ����{(di��o)��(ji��)�Ĝ�(zh��n)�_�Ժ�Һ��ϵ�y(t��ng)�ď�(f��)�s�Ժ͵Ϳɿ��ԡ�
�������������C(j��)��Ӌ��C(j��)����
���������C(j��)�Ƅ�ϵ�y(t��ng)���Ô�(sh��)�ֿ��ƣ��ӿڲ������ǔ�(sh��)��ʽ�{(di��o)���y���Ķ�ȥ���(f��)�s��Һ����·����������Ƅ����{(di��o)��(ji��)�Ĝ�(zh��n)�_�Ժ��ƄӵĿɿ��ԡ�
������(sh��)��ʽ�{(di��o)���y�����Q��(sh��)���y�����F(xi��n)��Ӌ��C(j��)��Һ����(zh��)�ЙC(j��)��(g��u)��ֱ�Ӕ�(sh��)�ֿ��ƣ����o�����g�h(hu��n)��(ji��)�������Ԍ�����(sh��)�o������(sh��)��(j��)�@ʾ��ӛ䛵ȼ�����һ��ʹϵ�y(t��ng)�������㣬�������ס���(sh��)���y�đ�(y��ng)���������C(j��)ȫ��(sh��)�ֻ���һ����Ҫ�M�ɲ��֡�
������Ŀǰ���յ��Y����r��������(sh��)���yҪ��(y��ng)���ڵV�������C(j��)������߀���������憖�}��
�����Ō��ڿ����yоʽ��(sh��)���y�������ÿ����yо���D(zhu��n)�ӻ��S���ƄӁ����ƹ�(ji��)�����_�������@�N�y�Y(ji��)��(g��u)�^��(f��)�s���ߴ�Ҫ���(y��n)���ڼӹ����y��
�����ƌ��ڇ������ʽ��(sh��)���y�������ò��M(j��n)늙C(j��)���Ɠ���λ�ã����؏�(f��)���ȼ�����Ⱦ�����
������Ŀǰ�Ĕ�(sh��)���y��ʹ�Â���Ӌ��C(j��)���Ƭ�C(j��)���ƣ���늙C(j��)�l����ͣ������ʹ���^����������C(j��)�����F(xi��n)�����ɔ_��(y��n)�أ���(d��o)�²��M(j��n)늙C(j��)���������\(y��n)�С�
������Փ��ԇ�D���F(xi��n)�������C(j��)Һ���Ƅ�ϵ�y(t��ng)���{(di��o)���y�M(j��n)�з�������������^�����o�ӑB(t��i)��(sh��)�W(xu��)ģ�ͣ����Ɣ�(sh��)���y���O(sh��)Ӌ��Փ���������_����(sh��)���y�ĽY(ji��)��(g��u)��ʽ�Ϳ��Ʒ������锵(sh��)���y���M(j��n)һ���O(sh��)Ӌ�о��ṩһЩ��Փ����(j��)��
�����ġ������C(j��)�{(di��o)���yϵ�y(t��ng)���
���������C(j��)�{(di��o)���yϵ�y(t��ng)������JTPһ12��С�������C(j��)��Һ��ϵ�y(t��ng)��D1��ʾ���{(di��o)���yϵ�y(t��ng)���ԭ����D2��ʾ�������C(j��)Һ��վ��������͉�5.4Mpa�����ݔ������99L��min������Һ�w����40̖����Һ���͡�
����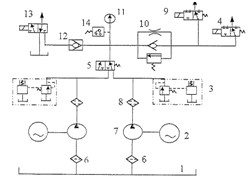
�����D1Һ��վϵ�y(t��ng)ԭ��D
����1—�]�䣻2—늄әC(j��)��3—�ҹ�{(di��o)���y��4��5��9��13—늴��y��6—�W(w��ng)ʽ�^�V����7—�~Ƭ�ã�
����8—���Y(ji��)�^�V����10—�C���y��11—��������12—�����y��14—�����^���
����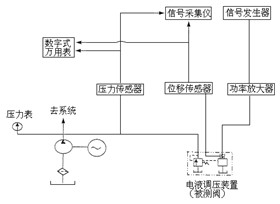
�����D2�{(di��o)���yϵ�y(t��ng)���ԭ��
������Ҫ�x����λ�Ƃ�����ZZF6—����늜u��ʽλ�����������������������CYZ��ݔ����������������̖�l(f��)����1250�l��푑�(y��ng)�����x����(sh��)��(j��)�ɼ��b��EPC—2000�ͱ�yʽ���I(y��)Ӌ��C(j��)������PCL—818HD�ɼ���A/���D(zhu��n)�Q��
����ͨ�^���õ��{(di��o)���y���o���ӑB(t��i)푑�(y��ng)������D3������ʾ��
����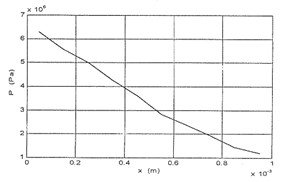
�����D���{(di��o)���y�o�B(t��i)���Ԍ������ �D���{(di��o)���y�ӑB(t��i)���Ԍ������
������(sh��)��(j��)��(j��ng)�^������ȡ�ᡢ���Y(ji��)���o�B(t��i)���攵(sh��)��(j��)���_���{(di��o)��ϵ�y(t��ng)�ӑB(t��i)ģ�ͱ��R��(sh��)��(j��)���r�g=0—0.3��s�������L0.003��s������(ji��)������e�A�Sݔ��=2.3mm2����=0����=5mm2����>0��������=0��0.0013��0.0164��……��4.0956��3.9852��4.0340��Mpa������100���ɘ��c��
����ͨ�^MATLAB�Z�Ծ��Ƴ���?q��)����ό��?sh��)��(j��)�����Ӻ���(sh��)ģ�ͱ��R�����R�Y(ji��)�����£�
������=��-��.0015��0.513��-5.9715��25.8045�ݣ�
����A=��-��.0001��0.0013��0.4147��3.9��14.3314�ݣ�
�������{(di��o)���y�Ă��f����(sh��)���Rģ�͞飺
����
�����塢��(sh��)���yʽ�{(di��o)���y�O(sh��)Ӌ�c����
����Ӌ��C(j��)���Һ����ϵ�y(t��ng)�M(j��n)�Ќ��r���ƣ��Ô�(sh��)����Ϣֱ�ӿ����y����(sh��)���y��ֱ���cӋ��C(j��)�ӿڣ�����Ҫ����D�D(zhu��n)�Q����
��������ʽ��(sh��)�։����y�M�ɣ����M(j��n)늙C(j��)�(q��)�әC(j��)��(g��u)���Ȍ�(d��o)�y�M�ɵ��Ȍ�(d��o)�����ʼ����y��
������(sh��)���y�Ȍ�(d��o)�����O(sh��)Ӌ����(sh��)���y�IJ��M(j��n)늙C(j��)���D(zhu��n)��ݔ�뵽��(sh��)���y�ĉ���ݔ��������Ҫ�к��m�ęC(j��)е�Y(ji��)��(g��u)�팍�F(xi��n)�@�N�D(zhu��n)�Q�����������y���ԣ��C(j��)е�D(zhu��n)�Q�C(j��)��(g��u)��Ҫ���]������������ܣ���푑�(y��ng)�ٶȡ����ԶȺ͏�(f��)λ�`���ԡ�ᘌ��@���cҪ���ù�(ji��)���C(j��)��(g��u)——����ʽ��(ji��)���C(j��)��(g��u)���������������c��
����1���Y(ji��)��(g��u)ԭ�����Σ��������D(zhu��n)�yоʽ��ʡȥ�˽�λ����ֱ��λ�Ƶ��D(zhu��n)���h(hu��n)��(ji��)��
����2�����M(j��n)늙C(j��)�����D(zhu��n)�yо���Ä���(li��n)�ӣ������푑�(y��ng)�ٶȺ͏�(f��)λ�`���Է�����ȫȡ�Q�ڲ��M(j��n)늙C(j��)�������ڙC(j��)е�����}��
����3�����Ãɂ����ο��������D(zhu��n)��(ji��)����ʽ�����Գ�ֱ��C�yо��λ���c��(ji��)����e׃�����ľ����P(gu��n)ϵ��
������Y(ji��)��(g��u)ԭ����D5��ʾ��
����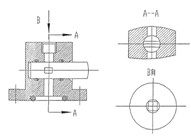
�����D5����ʽ��(ji��)���C(j��)��(g��u)
�������ʼ����y�O(sh��)Ӌ�������y���y���O(sh��)Ӌ�����˱��^�������O(sh��)Ӌ��S�c���������锵(sh��)��ʽ�����y���O(sh��)Ӌ�Ʌ�����ͨ�����y���M(j��n)�У��ڴ˲���٘����ֵ��һ����������y���ö���ͬ��ʽ�����y����(y��u)�c�ǹ�ˇ�Ժã��ӹ����Ⱥ��b�侫�����ױ��C���Y(ji��)��(g��u)���Σ�ͨ���ԡ����Q�Ժá���ˣ���(sh��)���y���O(sh��)Ӌ��(y��ng)���]�x�ö���ͬ��ʽ��
�������M(j��n)늙C(j��)�ĄӑB(t��i)���Է�����
�������M(j��n)늙C(j��)������c�X��(sh��)���Ĕ�(sh��)֮�g�����������P(gu��n)ϵ��
����
���������D(zhu��n)���D(zhu��n)�ٞ�
�������M(j��n)늙C(j��)��ؓ(f��)�d�r�\(y��n)�ӷ���
����
����ʽ��——���M(j��n)늙C(j��)�IJ��M(j��n)���ٶȣ�
����——���M(j��n)늙C(j��)���D(zhu��n)�أ�
����——ؓ(f��)�d���D(zhu��n)�أ�
����——���M(j��n)늙C(j��)���D(zhu��n)���D(zhu��n)�ӑT����
����——ؓ(f��)�d�D(zhu��n)�ӑT����
����——���M(j��n)늙C(j��)�ļ����D(zhu��n)�أ�
���������D(zhu��n)�ٹ�ʽ�ã�
����
����ʽ��——�����D(zhu��n)�ӑT��
�������ھ��w�IJ��M(j��n)늙C(j��)�ͽo��ؓ(f��)�d����r�£��������늙C(j��)������l�ʺ����(w��n)���\(y��n)���l�ʡ���ԓ�l�ʷ�����(n��i)�����M(j��n)늙C(j��)ÿ�õ�һ��ݔ����}�_�����Ԝ�(zh��n)�_�����D(zhu��n)һ������ǣ��Ķ����Ӕ�(sh��)���y���F(xi��n)�����{(di��o)��(ji��)��
�������M(j��n)늙C(j��)����ͨ������Ĕز�ʽ�(q��)���Դ���к�С���؏�(f��)�`�����?gu��)����ܜضȵ�Ӱ푣���˔?sh��)���y���бȱ����y���ߵ��؏�(f��)���ȣ����⣬��(sh��)���y�Ĝ��h(hu��n)�`��ҲС�ڱ����y��һ����1�����£��������y�Ĝ��h(hu��n)�`��һ����2—7��֮�g���@��Ҫ����鲽�M(j��n)늙C(j��)�Ĝ��h(hu��n)�h(yu��n)С�ڱ���늴��F�Ĝ��h(hu��n)��
������Ҋ����(sh��)���y���S����(y��u)������Һ���y�����ܶ���Դ�ڲ��M(j��n)늙C(j��)�����(q��)���·�����ܣ����Բ��M(j��n)늙C(j��)�������ϵ�y(t��ng)�ӑB(t��i)���ܵ��о���(y��ng)ԓ�ɞ锵(sh��)���y�о�����Ҫ��(n��i)�ݡ�
������(sh��)���y�ĄӑB(t��i)ģ�ͼ�Ӌ��C(j��)������
������(sh��)���y�ĽY(ji��)��(g��u)��D��D6��ʾ
����![]()
�����D6��(sh��)��ʽ�{(di��o)���yϵ�y(t��ng)��D
�������ڲ��M(j��n)늙C(j��)�ĄӑB(t��i)��(y��ng)�r�g����(sh��)Ҫ�h(yu��n)�h(yu��n)С�������y������ڽ��ƄӑB(t��i)���Է����У����Ѳ��M(j��n)늙C(j��)�Ă��f����(sh��)���飺
����
����ʽ��——���M(j��n)늙C(j��)�D(zhu��n)�ǣ�
����——ݔ���}�_��(sh��)��
����——���M(j��n)늙C(j��)�D(zhu��n)�࣬����40�X���������Ĺ�����ʽ��1.5°��
�������ڹ�(ji��)���C(j��)��(g��u)——����ʽ��(ji��)���C(j��)��(g��u)����(ji��)���yо�D(zhu��n)���c��(ji��)������e֮�g���P(gu��n)ϵ�飺
����
����ʽ��——��(ji��)����ȫ�_��e��
����
�����{(di��o)���y�Ă��f����(sh��)���Rģ�͞飺
����
������ˣ�����(j��)���f����(sh��)�����õ���(sh��)��ʽ�{(di��o)���yϵ�y(t��ng)���f����(sh��)��D�飺
����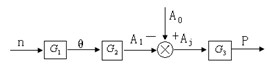
�����D7��(sh��)��ʽ�{(di��o)���yϵ�y(t��ng)���f����(sh��)��D
������MATLAB�h(hu��n)���У��{(di��o)�ã�������(sh��)������λ�A�S���棬�Y(ji��)�����¡�
����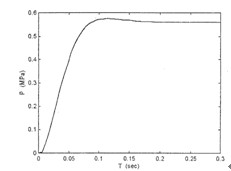
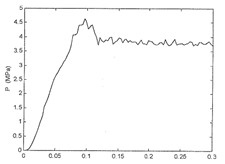
�����D8��(sh��)���y�ӑB(t��i)푑�(y��ng)Ӌ��C(j��)��������
�����D����ʾ�锵(sh��)���yϵ�y(t��ng)�ڲ��M(j��n)늙C(j��)����һ���}�_��̖�r��ݔ������푑�(y��ng)��r���ɈD���Եõ��������r�gtr=0.07s������{(di��o)��Mp=4%���{(di��o)���r�gtp=0.15s��
��������Y(ji��)���@ʾ��ԓģ�͵ĸ������ָ��(bi��o)�������������C(j��)�Ƅ�ϵ�y(t��ng)���{(di��o)��Ҫ��
�������������C(j��)��(sh��)�ֿ���ϵ�y(t��ng)
���������C(j��)�Ƅ��b�Ì������C(j��)ϵ�y(t��ng)�ķ�(w��n)������ȫ�\(y��n)���������P(gu��n)��Ҫ�����ã������C(j��)��(sh��)���Ƅ�ϵ�y(t��ng)�ĽM�ɲ�����D9��ʾ��
����![]()
�����D9�����C(j��)��(sh��)���Ƅ�ϵ�y(t��ng)
�������M(j��n)늙C(j��)�(q��)���·������VMOS���l�����ز��(q��)���·��ԓ�·��Q���p���;��w������Γ�������ɵĹ��ϣ�����˿ɿ��ԣ������}���{(di��o)��PWM���g(sh��)�����ز��l�ʹ̶���15—20��z����Q��늙C(j��)�i���r��늴������}��ͬ�r�ŷ��(q��)��ϵ�y(t��ng)���@�M����(sh��)څ���£��Ҳ���ه��늙C(j��)�@�M�е�늸Ѕ���(sh��)��
������(sh��)���y��Ӌ��C(j��)���ƣ��������Ȼ�nj����M(j��n)늙C(j��)�Ŀ��ơ����M(j��n)늙C(j��)�Ŀ��ư������r�����M(j��n)���}�_���䣩���ܡ�����Ͳ���(sh��)���ơ������l�ʿ��ƵȆ��}��������Ҫ��������Ҫ����(sh��)�����D(zhu��n)�١��D(zhu��n)�Ǻ��D(zhu��n)��
�������M(j��n)늙C(j��)����PLC���ƣ����ڲ��M(j��n)늙C(j��)���D(zhu��n)������ݔ���}�_��̖���ƣ������D(zhu��n)������ݔ���}�_��̖���l�ʛQ�������D(zhu��n)�^�ĽǶ���ݔ���}�_��̖���}�_����(sh��)�Q�����D(zhu��n)���ɭh(hu��n)�η�������ݔ��ͨ�^���M(j��n)늙C(j��)A��H��C���@�M���ƣ��h(hu��n)�η�����ͨ�^���Ƹ���ͨ늵�������Ʋ��M(j��n)늙C(j��)�D(zhu��n)��
���������O(sh��)Ӌ����“߉�O(sh��)Ӌ��”����߉�P(gu��n)ϵ����(d��ng)CON=0�����D(zhu��n)�r���M(j��n)늙C(j��)A��B��C�ྀȦ��ͨ�������—����—B—BC—C—CA—C……����(d��ng)CON=1�����D(zhu��n)�r���M(j��n)늙C(j��)A��B��C�ྀȦ��ͨ�������—��C—C—CB—B—BA—A……��
����ݔ��ݔ���O(sh��)���ַ�������1
������1ݔ��ݔ���O(sh��)��
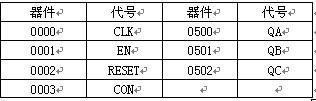
�������M(j��n)늙C(j��)�h(hu��n)�η�����PLC���ΈD��D10��ʾ��
����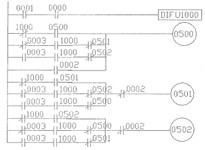
�����D10���M(j��n)늙C(j��)�h(hu��n)�η��������ΈD
�����O(sh��)��ʼ��B(t��i)��RESET��Ч���Ӻ��|��]�ϣ�0500ݔ����“1”��B(t��i)��0501��0502��“0”��B(t��i)��RESET�oЧ��������ݔ����B(t��i)���Ա���ԭ��B(t��i)��CON=0����(d��ng)EN��Ч������ݔ���}�_��̖CLKݔ�룬CLK�����ص������o���^����Ӻ��|�c�]��һ�������ڡ��ڴ����g����ݔ���^�����B(t��i)�Ա���ʧЧ��0500ݔ����B(t��i)��“1”��B(t��i)��0501ݔ����“0”׃“1”,0502ݔ����B(t��i)��“0”��һ�����������^��1000�Ӻ��|�c���_���Ӕ��|�c�]�ϣ���ݔ���^�����B(t��i)�֏�(f��)�Ա��֣��ȴ���һ��ݔ���}�_��̖�����صĵ�����
����PLC�h(hu��n)�η���������a(ch��n)�������}�_��̖ݔ���ӿ��B�Ӳ��M(j��n)늙C(j��)�(q��)���·ݔ����
�����ߡ��Y(ji��)Փ
�������M(j��n)늙C(j��)�Ŀ������������f�Ƕ�N���Ӷ࣬��Ӳ��߀�Ƕ���ܛ��������Ӌ��C(j��)����Ƭ�C(j��)��PLC���ƣ���Ҫͨ�^���H��r����������ú�V�����C(j��)�����h(hu��n)�����M(j��n)���ӣ���˶����PLC���ơ�
���������C(j��)�Ƅ�ϵ�y(t��ng)���Ô�(sh��)�ֿ��ƣ��ӿڲ������ǔ�(sh��)��ʽ�{(di��o)���y���Ķ�ȥ���(f��)�s��Һ����·����������Ƅ����{(di��o)��(ji��)�Ĝ�(zh��n)�_�Ժ��ƄӵĿɿ��ԡ�
������(sh��)��ʽ�{(di��o)���y���F(xi��n)��Ӌ��C(j��)��Һ����(zh��)�ЙC(j��)��(g��u)��ֱ�Ӕ�(sh��)�ֿ��ƣ����o�����g�h(hu��n)��(ji��)�������Ԍ�����(sh��)�o������(sh��)��(j��)�@ʾ��ӛ䛵ȼ�����һ��ʹϵ�y(t��ng)�������㣬�������ס�
������(sh��)��ʽ�{(di��o)���y���F(xi��n)�˔�(sh��)�ֿ��ƣ���D/A�D(zhu��n)�Q���Ĕ�(sh��)��һģ�M���ƣ����и��õĿ��ɔ_�Ժ��ߵĿɿ��ԡ�
����
���������īI(xi��n)��
����1.�����XҺ�������փԙC(j��)е���I(y��)������1990��4��
����2.�������Һ���y�O(sh��)Ӌ�cӋ��C(j��)е���I(y��)������1982��5��
����3.�O���|(zh��)Һ������ϵ�y(t��ng)�������I(y��)������1985��12��
����4.ɽ���C(j��)���SJTPϵ�еV�������C(j��)ʹ���f����1980��7��
����5.Ѧ�������ϵ�y(t��ng)Ӌ��C(j��)�o���O(sh��)Ӌ——MATLAB�Z�Լ���(y��ng)�����A��W(xu��)������1996��6��
����6.����ɔ�(sh��)���y�͔�(sh��)����Һ�����I(y��)1987.2
����7.��o(j��)��ȬF(xi��n)������Ԫ����ӹ��I(y��)������1995��4��
����8.�����Ԅӿ���ԭ�����A��W(xu��)������1992��4��
����(bi��o)�}�������C(j��)�Ƅ�ϵ�y(t��ng)��(sh��)���y�о�
�D(zhu��n)�dՈע�����ԣ�http://www.56st48f.cn/fblw/ligong/jixie/7823.html
���P(gu��n)���}���
�zӰˇ�g(sh��)�I(l��ng)��AHCI�ڿ����]��Phot...�P(gu��n)ע:106
Nature���¶��W(xu��)���ӿ�Nature Com...�P(gu��n)ע:152
��С�W(xu��)�̎�ֵ���˽⣬�@Щ�����W(xu��)...�P(gu��n)ע:47
2025�ꌑ����W(xu��)Փ�Ŀ����õ�19��...�P(gu��n)ע:192
�y�L�I(l��ng)��Ƽ������ڿ��x�� �p����...�P(gu��n)ע:64
���r�_Փ�ęz���C������Ҫ�P(gu��n)ע:52
�Ї�ˮ�a(ch��n)�ƌW(xu��)�ڿ��Ǻ����ڿ����P(gu��n)ע:54
���H������Ҫ�˽�Ć��}����P(gu��n)ע:58
���������ܷ��u�Q���P(gu��n)ע:48
��ŌW(xu��)����Щ��Ͷ���SCI�ڿ���ֵ...�P(gu��n)ע:66
ͨ�Ź����ИI(y��)Փ���x�}�P(gu��n)ע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�P(gu��n)ע:121
�u�Q�l(f��)Փ�ĺ�߀�dz������P(gu��n)ע:68
��(f��)ӡ���Y����Ҫ�D(zhu��n)�d��Դ�ڿ���...�P(gu��n)ע:51
Ӣ���ڿ����峣Ҋ��Փ�Ġ�B(t��i)����...�P(gu��n)ע:69
Web of Science ���ĺϼ��ڿ��u��...�P(gu��n)ע:59
����Փ�ķ���
�����O(sh��)ӋՓ�� ����Ҏ(gu��)��Փ�� �V�I(y��)Փ�� �C(j��)�һ�w��Փ�� ���bՓ�� ��ͨ�\(y��n)ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅӻ�Փ�� ܇�vՓ�� ұ��Փ�� ���I(y��)�O(sh��)ӋՓ�� �C(j��)еՓ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)