�oˢֱ��늙C��ϵ�y�OӋ�о�
���ٙ�Ŀ����Ӽ��gՓ�� �l�����ڣ�2019-11-01 10:55 ��ȣ�
����ժҪ������C�һ�w��늙C�aƷ���oˢֱ��늙C�����^�õĿɿ��Ժ͌��{�ٷ��������ØO��V�������������ϵ�y�����c��������ӑՓ�˟oˢֱ��늙C�Ŀ���ϵ�y���OӋ�����F�˻���STM32F103ZET6�������ğoˢֱ��늙C����ϵ�y���\��ԓоƬ��GPIOģ�K��PWMģ�K�Ͷ��r��ģ�K�ȣ��������Ч��PID�㷨�����F�˟oˢֱ��늙C�Ć���ֹͣ���ơ�λ�Ùz�y���]�h�{��������Ҫ���ܡ����Y���C�����˿���ϵ�y�ɱ��^�������\��Ч�����ã��ԃr���^�ߡ�
�����P�I�~���oˢֱ��늙C;STM32F103ZET6;����ϵ�y;PID�㷨
����1 ����
�����S����Ӽ��g�İlչ�����͙C�һ�w��늙C���oˢֱ��늙C���F�ˣ����ǬF��늙C���g����Ӽ��g�Ϳ�����Փ��Y�ϵĮa������Ј���Ҫ�����L���oˢֱ��늙C�V���������Ԅӻ��b�ã����պ��죬��܇��������M���t���O�䣬�k���Ԅӻ����ճ�����ȸ��I�oˢֱ��늙C(��BLDCM)�������һ�����D�ӵ��õ�ֱ��늄әC���������ô������D���ϣ����@���ڶ����ϡ���������ˢֱ��늙C��ԓ늙C�]���ˢ�͓Q�����Ļ�ĥ�p���}������Ҫ�����S�o�����и��D�١���Ч�ʡ��߿ɿ��ԡ��ܺĵ͡������͡��������L�����ŷ����ơ��������ú��^�ͳɱ������c���@Щ���cʹ�����õ�Ѹ�ٵİlչ���ռ����F���ѽ��ɞ�����аlչǰ;��늙C�aƷ[1] ��
�������՟oˢֱ��늙C�Ĺ���ԭ��������_�P�ēQ��ȡ�Q���D�ӴŘOλ����̖��Ŀǰ��Ҫ�Ѓ���g�܉�õ��D��λ����̖����һ��g�Dz��ßoλ�Â������Ŀ��Ƽ��g������ă�����ͨ�^�g�ӵ��D��λ����̖�ęz�y������ֱ�����D��λ�Â������@ȡ�D��λ�ôŘO��̖�����ϣ��oλ�Â��������Ƽ��g�Ǐ�ܛ����Ӳ�����ƃɷ������֣������˿��Ƶď��s�Զ�����늙C�Y�����s�ԡ�λ�Ùz�y�������·��Ҫ��������늄ӄ��^���c������늄ӄݱ��^����3���C����늄ӄݙz�y������늄ӄݷe�֙z�y�����m�����O�ܷ��ȵ�[1] ��
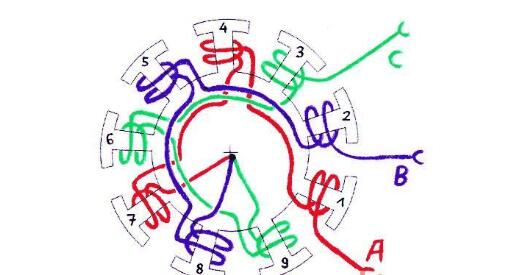
�����ڶ���g��ͨ�^���bλ�Â������@ȡ�D����̖���������Ԫ����ԓ���g���V�����á�����������������(�A�ܿ��g�����Ѓɂ���������g�� 60 �Ȼ��g�� 120 ��)���D��ÿ���D 60 ��(120��)늶Ƚǣ��tij������������׃���B����ô�c֮����������׃���ȵ�ijһ����_�P��B�S������׃��һ�Σ�����_�P��B׃������(��Q����)�������һ��늚����D����������ݔ��푑���“0”��“1”�ɷN��B�ķ������Ķ��Д��D���@�M��λ��[7-8] ���������������гߴ�С���|���p������ɱ��͡������Ҏģ���a�ȶ������c�����ϱ��OӋ���OӋ����ϵ�y�в��û�����������y���D�ӵ�λ����Ϣ[9] ��
����2 ϵ�y�OӋ
�����oˢֱ��늙C(BLDCM)�����ඨ�Ӻ��D�ӽM�ɣ������@�M�Б��ň��c�D�Ӵň�����îa������ʹ늙C�D�ӡ����Ɵoˢ늙C�D�ӣ����֪���D�ӵĮ�ǰλ�ã����Ŀ���ϵ�y�в��û�����������y���D�ӵ�λ����Ϣ����3������Ԫ���a�����ƽ�ĕr����Д�˿̵��D��λ�ã����������Ķ����@�M�M��ͨ늡�ÿһ�ΓQ�����һ�M�@�M̎������ͨ늣��ڶ��M�@�M����ͨ늣�����һ�M��ͨ늣��ɴ���늙C�D��[1][7] ��
����2.1 ϵ�yӲ�����F
����2.1.1 �����x��ϵ�y�� STM32F103ZET6(���º��Q STM32)������оƬ�� STM32�����S����PWMͨ���������r����AD�D�Qͨ�����m������늙C���Ƶ��OӋ���ڌ��Hʹ���^���У���Ҫʹ��ijģ�K���ܣ�ֻҪ���ú�������ģ�K�Ĵ������У�������Ҫ�������s������������˾Ϳ���ʹ����Ҫ�������Ӳ���·���ܣ������\���^���г��F�Ć��}�������M�з��㼰�r���{ԇ�;S�o[11-14] �����⣬ԓоƬ�ⲿ���_�S������ϵ�yֻʹ�����������_���������ֿ����������Uչ���ܵ��_�l���á�
����2.1.2 Ӳ�������OӋ
����������ϵ�y���Դ���֣����·��STM32 ��������λ�á��ٶșz�y��Ӌ��C����ͨ�ŵȽM�ɡ�STM32����̎���ɼ��ջص������λ����̖�ȸ��N���������FBLDCM�Ŀ����㷨���Լ�ݔ���oˢ늙C���D����Ҫ���}�_��̖������оƬSTM32�t�����o����ָ������������PWM�}�_��̖���Դ˿�����ϵ�y���_�P�r�g��ʹ�oˢֱ��늙C���D���_���A��ֵ��
����(1)���·�Ӳ����x��оƬA4931������һ�����Ƶ������oˢֱ��늙C��ǰ��������ԓ�O����Ӷ�NN�ϵ��Ĺ��ʈ�Ч�����w��(MOSFET)��֧�ֵ��R�_���늉����_30V���Q��߉�����120����������Ԫ����ݔ����̖�Q����߀������·����Ԫ��ݔ�����ڿ����|�l߉�����Ҿ߂��D���i�����o���ܡ� A4931ݔ������Ĵ�Сȡ�Q���ⲿMOSFET���������D���i�����o�z�y�ӕr���B��CLD���_���ⲿ��݁��O�á�ENABLE�� DIRECTION��BRAKE ݔ������ڿ���늙C���D�٣�λ���c�D�ء��ṩ�ɷN������Ʒ�ʽ�����ɲ����ⲿ��̖��ͨ�^ EN⁃ ABLEݔ���_��MOSFET�M��PWM���ƣ�Ҳ������оƬ�Ƚ��� PWM ����{�������F������ A4931 �߂�ͬ���������ԣ��oՓ�����ķN������Ʒ�ʽ�����ܴ_�������˥�p�r�_ͨ�m���� MOSFET������o�^�Ĺ��ʓp�ġ����溆�ν�B�ׂ���Ҫ�������_�Ĺ��ܼ��÷���
����(2)λ�á��ٶșz�y�·�������a������������ʽ���a������ʽ���a�������Ԍ���N늙C���F�]�h���ƣ����ڙz�y�\��ϵ�y��λ�ú��ٶȡ�����ֱ�����ù���D�Qԭ��ÿ�D�^��λ�ǶȾ�ݔ��һ���}�_��̖��ͨ����A��B��Z��ݔ����A�ࡢB��������t1/4���ڵ��}�_��̖���������t�Pϵ���ԅ^�e�����D�������A �೬ǰB �࣬��ô늙C�����D�����������ġ����A�����B�࣬��ô늙C�����D������Ƿ���ģ�Z��Q�������}�_��ÿ�DһȦ�a��һ���}�_����������Á��_���^��λ�á�
����2.2ϵ�yܛ�����Fϵ�y������Ҫ��Ӳ����ʼ����λ�Ùz�y���Q�࣬�ٶșz�y���ٶ� PID �{���ȽM�ɡ�Ӳ����ʼ����Ҫ�dz�ʼ��Ҫ�õ��� GPIO�˿ڣ��Д���ƣ�PWMģ�K�����r��TIM�ȡ�λ�Ùz�y��Ҫ��ͨ�^��Ƭ�CIO�ڙz�y���a��ݔ���}�_��̖���_���D�ӵ�λ����Ϣ��ֻҪ�O����Ҫ��Ȧ�����D�٣�ͨ�^����ͨ�ţ����܉����늙C���A���D��������A����Ȧ�����Ԅ�ͣ�����Q���ǽ��^�z�y��Ƭ�CIO�ڻ����ƽ��B��Ӌ���D��λ�ã���������ǰ�D�ӵ�λ����Ϣ��׃�������ͬ�r�g��һ�Εr�g�xȡ�A�����D�٣����D�Q������ռ�ձȵ�PWM��̖���oˢ늙C�M���{�ٿ��ƣ����Cϵ�y���õ��o�B���Ժ̈́ӑB���ԣ����˝M�㌍�r�Կ���Ҫ��������Д����{�á�
����3 �YՓ
�������Y�������������п���ϵ�y�܉F���oˢֱ��늙C�����P���ƣ��Y�Ͼ��_��PID�㷨���܉�ܺõؿ���늙C���D�٣����\�з�����ͨ�^����ͨ�ţ�ʹ��ԓϵ�y�������õĆ���ֹͣ���Q�ࡢ�{�����ԣ��oˢֱ��늙C�\�з����ɿ���ʹ�� STM32�OӋ�oˢֱ��늙C���ӿ���ϵ�y��ϵ�y������Ӳ���OӋ�Y�����Σ��ɱ��^�ͣ�ϵ�y�ɿ��Ըߣ����^�ߌ����ԣ����ƏVʹ�á����^�L�r�g�Č��`�C������ϵ�y���P�������OӋ�Ǻ����ġ���K�YՓ��ϵ�y�������п����ԡ������ԣ��Ұ�ȫ�ɿ���
���������īI��
����[1] �T����.���şoˢֱ��늙C���g[M].�Cе���I������,2011.
����[2] ����,������,�����.�oˢֱ��늄әC�ķ�늄ӄݷe�ַ�λ�Ùz�y���g�о�[J].���V�Ԅӻ�,2009(8):63-65.
����[3] ���x,�R��,�R��,��.���ڷ�늄ݷe���a�����ğoˢֱ��늄әC����[J].��늙C��2008,06:37-39.
�������oˢֱ��늙C��ϵ�y�OӋ�о�����Դ������X֪�R�c���g�������ߣ����Ȼ���O���
�����}���oˢֱ��늙C��ϵ�y�OӋ�о�
�D�dՈע�����ԣ�http://www.56st48f.cn/fblw/dianxin/dianzijishu/41157.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:105
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИIՓ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:120
�u�Q�lՓ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D�d��Դ�ڿ���...�Pע:51
�����ϢՓ�ķ���
���ܿƌW���gՓ�� �V���ҕՓ�� ��늼��gՓ�� Ӌ��C��Ϣ����Փ�� Ӌ��C�W�jՓ�� Ӌ��C����Փ�� ͨ��Փ�� ��Ϣ��ȫՓ�� ��ӑ���Փ�� ��Ӽ��gՓ�� �����t�W����Փ�� ܛ���_�lՓ��

�ڿ��ٿƆ���
- �zӰˇ�g�I��AHCI�ڿ����]��Photog
- Nature���¶��W���ӿ�Nature Commu
- ��С�W�̎�ֵ���˽⣬�@Щ�����W��
- 2025�ꌑ����WՓ�Ŀ����õ�19���x
- �y�L�I��Ƽ������ڿ��x�� �p������
- ���r�_Փ�ęz���C������Ҫ
- �Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ���
- ���H������Ҫ�˽�Ć��}���
- ���������ܷ��u�Q��
- ��ŌW����Щ��Ͷ���SCI�ڿ���ֵ��
- ͨ�Ź����ИIՓ���x�}
- SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ���
- �u�Q�lՓ�ĺ�߀�dz�����
- ��ӡ���Y����Ҫ�D�d��Դ�ڿ���20
- Ӣ���ڿ����峣Ҋ��Փ�Ġ�B�����